Edytowane przez dr Giovanniego Chetta
Specyficzny ruch człowieka
Specyficzny ruch człowieka można zdefiniować jako zespół dynamicznych, energetycznych i pouczających zdarzeń, które zbiegają się w dwunożnym naprzemiennym chodzie (ruch z progresją) i w pozycji stojącej (ruch bez progresji).
Ze wszystkich struktur ośrodkowego układu nerwowego ponad jedna czwarta uczestniczy bezpośrednio, a ponad połowa pośrednio w planowaniu i wykonywaniu ruchów, dlatego człowiek, ze swoimi 650 mięśniami i 206 kośćmi, jest przede wszystkim „zwierzęciem motorycznym”.
W rzeczywistości człowiek musi się poruszać dla własnego przetrwania i dobrego samopoczucia, dlatego lokomocja jest czynnością, która ma pierwszeństwo przed wszystkimi innymi. W rzeczywistości w świecie życia na najwyższym poziomie jest specyficzny ruch człowieka, który reprezentuje najbardziej złożony proces naturalny. wyzwolenie rąk jest tego następstwem (Paparella Treccia, 1988). Funkcje motoryczne i ciało, uważane w wielu kulturach za byty podrzędne i podporządkowane czynnościom poznawczym i umysłowi, są natomiast źródłem tych abstrakcyjnych zachowań, z których jesteśmy dumni, w tym samego języka, który kształtuje nasz umysł i nasze myśli ( Oliviero, 2001) W fazie embrionalnej, płodowej i we wczesnym dzieciństwie działanie poprzedza czucie: wykonywane są ruchy odruchowe, a następnie są one postrzegane. To z odruchów proprioceptywnych rodzą się reprezentacje umysłowe (engramy), które umożliwiają narodziny złożonych zdolności motorycznych i tych samych idei.W krytycznych momentach (intensywny stres) układ mięśniowy stanowi system o wysokim priorytecie: po aktywacji inne systemy, takie jak te odpowiedzialne za percepcję doznań, uwagę, czynności poznawcze itp., znajdują się w stanie względnej blokady, gdyż stan ten związany jest w „nieświadomości” z wykonywaniem czynności ważnych dla przetrwania, takich jak ucieczka , atak, poszukiwanie pożywienia, partnera seksualnego, gniazdo… Wreszcie dzisiaj wiemy, jak bardzo prosty spacer w naturalnym środowisku jest bardzo silnym przywróceniem równowagi obu półkul mózgowych.
Obecny organizm człowieka jest więc przede wszystkim konsekwencją konieczności wykonania spaceru z maksymalną wydajnością na dwóch nogach w polu grawitacyjnym po naturalnie nierównym terenie.Według tej teorii człowiek musi być w stanie poruszać się przy minimalnym zużyciu energii. na „wewnętrznym stałym polu grawitacyjnym, czego konsekwencją jest to, że podczas chodu różne struktury (mięśnie, kości, więzadła, ścięgna itp.) są poddawane minimalnemu obciążeniu.

- ten fasety i krążki międzykręgowe nie zapobiegają rotacji, ale ją wspierają; kręgi nie zostały zbudowane dla statycznej stabilności strukturalnej. W rzeczywistości lordoza lędźwiowa wraz ze zgięciem bocznym mechanicznie indukuje, poprzez mechaniczny układ momentu obrotowego, skręcenie kręgosłupa.
- Rola dolne kończyny jest drugorzędna w stosunku do kręgosłupa. Tylko one nie są w stanie obracać miednicy, aby umożliwić ruch, ale mogą wzmocnić jej ruch.
Kończyny dolne wywodzą się bowiem z ewolucyjnej potrzeby rozwijania szybkości ruchu człowieka, a większa siła potrzebna do tego celu nie może pochodzić z mięśni tułowia, które w tym celu powinny wytworzyć masę, która jest niemożliwa z punktu widzenia ludzkiego ciała.” Odcisk stopy. Ewolucja musiała więc przygotować dodatkowe mięśnie, umieszczając je zarówno ze względów funkcjonalnych, jak i przestrzennych poza tułowiem, czyli na kończynach dolnych.Pierwszym zadaniem kończyn dolnych jest więc dostarczenie energii, która pozwala nam poruszać się z dużymi prędkościami. Dzięki nim ruchy międzykręgowe, a zwłaszcza rotacje w płaszczyźnie poprzecznej, mogą korzystać z komplementarnego wkładu mięśni podkolanowych (podkolanowych, półścięgnistych i półbłoniastych), z którymi kręgosłup jest połączony poprzez specyficzne i znaczne anatomiczne łańcuchy mięśniowo-powięziowe:
- więzadło krzyżowo-guzowate – mięsień najdłuższy lędźwi (położone po bokach kręgosłupa)
- więzadła krzyżowo-guzowatego i biodrowo-lędźwiowego klatki piersiowej (w ten sposób prawe mięśnie podkolanowe kontrolują część lewego mięśnia piersiowego i odwrotnie),
- mięśnie pośladkowe maksymalne - przeciwległe wielkie mięśnie grzbietowe (które z kolei kontrolują ruch kończyn górnych).




Stopa nie jest więc systemem łuków czy sklepień, ale także bardzo wyrafinowanym helikoidalnym systemem czuciowo-ruchowym (Paparella Treccia, 1978).
„Ludzka stopa to „dzieło sztuki i arcydzieło inżynierii”
Michał Anioł Buonarroti
Stopa jest organem czuciowo-ruchowym, pomostem między systemem a środowiskiem, składającym się z „helisy o zmiennym skoku, złożonej z 26 kości, 33 stawów i 20 mięśni, która oddziałuje na całe ciało.
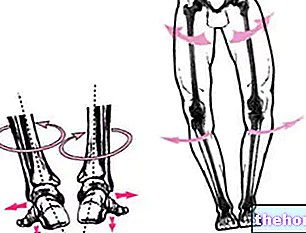
Gdy kolano jest zgięte, ruchy nogi są możliwe zarówno w kierunku bocznym (1-2 cm w kostce), jak iw rotacji osiowej (rotacja zewnętrzna 5°). Jest to konieczne, aby umożliwić optymalne podparcie stopy w stosunku do nierówności podłoża.Z drugiej strony, w pełnym wyprostowaniu kolano, poddane dużym siłom obciążenia, wykazuje w warunkach fizjologicznych dużą stabilność, dlatego pojawia się blokada stawu, która solidaryzuje kość piszczelową z kością udową (Kapandji, 2002), dlatego w stanie zgięcia kolano jest w stanie „filtrować” rotacje stopy i nogi, podczas gdy w pełnym rozciągnięciu rotacje te są przeniesione integralnie do kości udowej, wpływając w konsekwencji na obręcz miedniczną (w szczególności staw biodrowo-udowy i staw skokowo-łódeczkowaty mają podobną budowę i odpowiednio ułożone).

W pozycji odniesienia więzadła biodra są umiarkowanie rozciągnięte.W rotacji zewnętrznej napięte są wszystkie więzadła mocne przednie (napięcie maksymalne na poziomie wiązek poziomych, tj. więzadło krętarzowo-krętarzowe i łonowo-udowe), natomiast tylne (więzadło kulszowo-udowe) rozluźnione. występuje odwrotność, więzadło kulszowo-udowe jest rozciągane, podczas gdy więzadła przednie są uwalniane (Kapandji, 2002).


Stosunek obrotów w płaszczyźnie poprzecznej i czołowej ma tendencję do złotej liczby Złota sekcja, a także stosunek długości między różnymi częściami szkieletu (np. długość tyłostopia / przodostopia).
'Specyficzny ruch człowieka, jeden z najbardziej godnych podziwu procesów w przyrodzie, stoi na wirujących filarach, opiekunach złotej liczby, w sobie i we wzajemnych relacjach „(Paparella Treccia, 1988).
Wykorzystując pole grawitacyjne jako tymczasowy magazyn zapasowy, ruch właściwy człowieka charakteryzuje się maksymalną efektywnością energetyczną: na każdym kroku, podczas wznoszenia się środka ciężkości (faza wyhamowania), energia kinetyczna jest magazynowana w postaci energii potencjalnej na ten czas. być następnie przekształcone z powrotem w energię kinetyczną podczas opadania środka ciężkości, przyspieszając ciało do przodu i podnosząc środek ciężkości.

Chwała śmigłu


' Jeśli figura została wybrana przez Boga jako dynamiczna podstawa jego immanencji w formach, to ta figura jest helisą "(Goethe)
Tam siła grawitacji, zarówno z funkcjonalnego, jak i strukturalnego punktu widzenia, nie powinna być zatem postrzegana jako wróg; bez niej człowiek nie mógłby istnieć.
Inne artykuły na temat „Ruch człowieka i znaczenie „wsparcia zamka”
- Postawa i tensegrity
- Skolioza - przyczyny i konsekwencje
- Diagnoza skoliozy
- Rokowanie skoliozy
- Leczenie skoliozy
- Macierz pozakomórkowa - struktura i funkcje
- Tkanka łączna i powięź łączna
- Pasmo połączeniowe — cechy i funkcje
- Znaczenie prawidłowego podparcia zamka i zgryzu
- Skolioza idiopatyczna – mity do rozwiania
- Przypadek kliniczny skoliozy i protokołu terapeutycznego
- Wyniki leczenia Przypadek kliniczny Skolioza
- Skolioza jako postawa naturalna - Bibliografia